一种机电耦合变位齿轮刚度及瞬态动力学计算方法
一种机电耦合变位齿轮刚度及瞬态动力学计算方法
1.本发明涉及变位齿轮故障领域,特别是涉及一种机电耦合变位齿轮刚度及瞬态动力学计算方法。
背景技术:
2.齿轮传动在机械领域具有重要地位,已经广泛应用于汽车、机器人、铁路机车、风力发电等多种领域。大多数情况下,齿轮要承受启动、过载、变速等冲击,从而导致齿轮产生失效,其中齿根裂纹是最常见的失效形式。裂纹产生会使传动系统的啮合刚度降低,在动力学中表现为振动冲击。在服务机器人关节中,大多采用变位齿轮传动系统,其工作于变速变载等工况下。因此对变位齿轮裂纹及瞬态动力学的研究具有重要意义。目前对小模数变位齿轮故障机理研究一直存在一定空白,此外大多数学者并未考虑电机抖动以及工作在瞬态工况下的振动位移情况。
3.为了解决上述问题,本发明提出了一种机电耦合变位齿轮刚度及瞬态动力学计算方法,该方法考虑电机与小模数变位齿轮副的振动耦合效应,建立含裂纹故障的机电耦合动力学模型,分析了瞬态工况下的振动位移:填补国际相关技术空白,推动精密传动领域工程技术发展,又可产生较大的社会效益与经济效益。
技术实现要素:
4.为了克服现有技术不足,填补相关技术空白,本发明提供了一种机电耦合变位齿轮刚度及瞬态动力学计算方法。
5.本发明解决其技术问题所采用的技术方案如下:一种机电耦合变位齿轮刚度及瞬态动力学计算方法,其特征在于:步骤(1):对于小模数变位齿轮,根据不同变位系数,建立变位齿轮的齿廓方程,其公式为:;其中,为变位系数,为分度圆压力角,为齿数,为当前啮合位置的配合角,为基圆半径,对于不同变位系数可得到不同变位齿廓方程;步骤(2):根据上一步生成的变位齿廓方程,在程序中可找到齿廓任意点的坐标,变位齿轮刚度计算包含弯曲刚度、剪切刚度、压缩刚度和赫兹接触刚度;对于瞬态动力学研究,变位齿轮副接触面积变化,导致其赫兹接触刚度变化,其赫兹接触刚度为:;步骤(3):变位齿轮长时间运行产生裂纹,变位齿轮裂纹存在单侧裂纹和双侧裂纹
两种形式,裂纹会影响变位齿轮的啮合刚度;齿根和基圆位置会影响弯曲刚度、剪切刚度、压缩刚度;当齿根圆大于基圆时,其弯曲刚度、剪切刚度、压缩刚度的倒数分别为:,,;当齿根圆小于基圆时,其弯曲刚度、剪切刚度、压缩刚度的倒数分别为:,,;步骤(4):考虑到裂纹沿齿宽侧变化不同,裂纹主要影响截面惯性矩和截面面积,根据积分原理,求得裂纹情况下变位齿轮的总刚度为:;其中,为赫兹接触刚度,、为主动齿轮、从动齿轮,、、分别为弯曲刚度、剪切刚度、压缩刚度,为基体刚度;步骤(5):对于无刷电机,经过park变换,其坐标变换方程为:;故电压方程、磁链方程和电磁转矩方程为:,,
;下标、代表、轴分量,下标、代表定子和转子上的量;为微分算子;为定转子互感,;、、、、、分别为电压、电流、电阻、自感、漏感及磁链, 为磁极对数,为坐标系的角速度,其值等于定子电源的同步角速度,为转子电角速度;将电机的输出转速、转矩与齿轮副的输入转速、转矩建立关联,得到机电耦合动力学方程:;将电机电磁转矩和转子转速作为公共变量在电机和变位齿轮传动系统之间实时传递数据,从而构建电机驱动多级齿轮传动系统的机电耦合模型;根据耦合模型建立多自由度机电耦合变位齿轮副动力学方程,在建模过程中考虑各构件的弯曲扭转变形、生产制造产生的误差和安装引起的误差;将健康变位齿轮刚度和裂纹变位齿轮刚度代入动力学方程对其求解,可得到对应的振动位移。
6.与现有技术相比,本发明的有益效果:建立了变位齿轮的时变啮合刚度技术方法,可根据基圆和齿根圆的大小对刚度进行精细化计算;考虑了在瞬态工况下齿轮接触区域发生变化的时变赫兹接触刚度,综合刚度计算更加准确;建立了机电耦合动力学模型,同时考虑了安装和制造误差,分析了瞬态情况下的振动位移。
附图说明
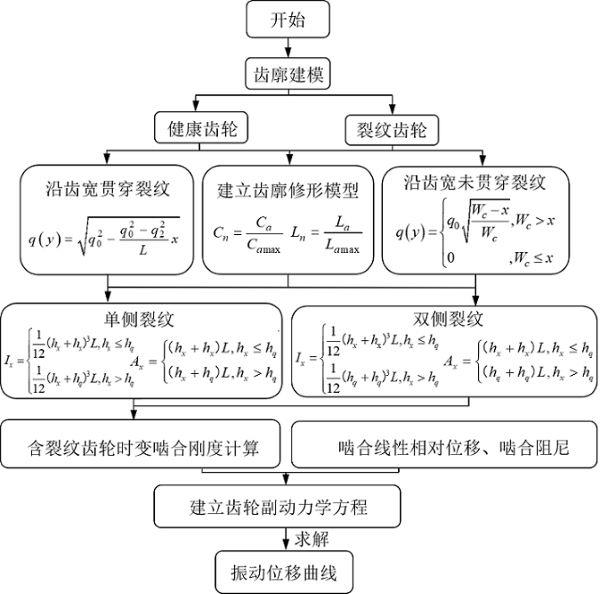
7.图1是机电耦合变位齿轮刚度及瞬态动力学计算方法流程图;图2是健康小模数变位齿轮;图3是裂纹小模数变位齿轮及其裂纹形式;图4是单侧和双侧贯穿裂纹刚度对比;图5是单侧和双侧未贯穿裂纹刚度对比;图6是健康齿轮副瞬态振动位移;图7是裂纹齿轮副瞬态振动位移。
具体实施方式
8.参考附图描述本发明的实施方式,下面结合图1—图7对本发明具体实施方式进行详细说明。
9.服务机器人关节受其体积限制,传动系统采用小模数变位齿轮。参照图1所示为机电耦合变位齿轮刚度及瞬态动力学计算方法流程图,包括以下步骤:步骤(1):健康小模数变位齿轮,如图2所示,其参数如表1所示:表1齿轮i齿数模数/mm变位系数/mm齿宽/mm1140.20.453.5
2820.20.253.5建立变位齿轮的齿廓方程:;其中,为变位系数,为分度圆压力角,为齿数,为当前啮合位置的配合角,为基圆半径。齿根圆角处方程为:;其中,为分度圆半径,、、为刀具参数,其公式如下:;步骤(2):单个齿轮的受力类比为悬臂梁结构,齿轮相互作用时,受到弯曲、剪切、压缩和赫兹能量,其表达式为;其中()表示弯曲、剪切、压缩和赫兹接触能量, ()表示弯曲、剪切、压缩和赫兹接触刚度,为接触点出的啮合力;对于瞬态动力学研究,其接触面积一直变化,导致其赫兹接触刚度一直变化,其赫兹刚度为:;步骤(3):由表1中的参数可以发现,齿根圆和基圆存在两种情况;齿根和基圆位置会影响弯曲刚度、剪切刚度、压缩刚度;当齿根圆大于基圆时,其弯曲刚度、剪切刚度、压缩刚度倒数分别为:,,;当齿根圆小于基圆时,其弯曲刚度、剪切刚度、压缩刚度倒数分别为:
,,;其中,为弹性模量;为接触线齿宽;为剪切模量;泊松比,和分别为齿廓任意处的截面惯性矩和截面积。
10.步骤(4):在机器人关节中齿轮传动系统需要频繁正反转,导致齿轮过快产生疲劳裂纹,且裂纹往往出现在一个齿的两个侧面,如图3所示;当裂纹出现在单侧时,其公式为:,;其中,为裂纹侧有效齿厚,为不同齿宽位置处裂纹深度,为裂纹扩展角度;当裂纹出现在双侧时:,;裂纹齿轮存在沿齿宽贯穿和不管穿两种形式,当贯穿时:;当裂纹沿齿宽方向未贯穿时,抛物线方程为:;其中:为裂纹沿齿宽贯穿时另一侧端面裂纹深度,为沿齿宽方向有效裂纹长度,为在裂纹起始端面上裂纹深度;根据微元法可以求得每片齿厚下的刚度,则裂纹情况下的总刚度为;其中,为赫兹接触刚度,、为主动齿轮、从动齿轮,、、为弯曲刚度、剪切
刚度、压缩刚度,为基体刚度;步骤(5):根据刚度计算,求得刚度如图4、5所示,齿轮副动力学方程为:;其中,为质量,为转动惯量,为时变啮合阻尼,为时变啮合刚度,为支撑阻尼,为支撑刚度,为沿啮合线方向的相对位移,为综合误差,为电机转矩,为负载转矩;将电机的输出转速、转矩与齿轮副的输入转速、转矩建立联系,得到机电耦合动力学方程:;将健康齿轮刚度和裂纹齿轮刚度代入动力学运用龙格库塔对其求解,可得到对应的振动位移如图6、7所示;相较于以往计算方法,该方法更能体现瞬态工况下得裂纹振动特性,同时可以明显观察到裂纹处振动位移受瞬态影响更大。
11.以上所述,仅是发明的较佳实施方式,并非对本发明做任何限制,凡是根据本发明实质对以上实施方式所作的任何修改、变更以及等效变化,均仍属于本发明技术的保护范围之内。
完整全部详细技术资料下载
当前第1页 1 2
相关技术
- 斜齿轮裂纹和修形耦合损伤动力...
- 一种碳排放量监测方法、装置、...
- 一种台架测试方法及装置、电子...
- 一种衡量点云孪生几何准确度的...
- 光学生物辨识模块的制作方法
- 基于神经网络的低资源场景下关...
- 一种智能机房的管理方法、装置...
- 一种界面调整方法、装置、电子...
- 一种基于存内CNN中间缓存调...
- 一种日志防篡改方法、装置、设...
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1